TwoMassID
Description
This state includes an automated identification process for typical parameters of a two-mass system. This state is based on [1], but has been modified slightly to fit into the ParameterID library of the UltraZohm. This includes the inertia of the motor and load side, as well as the stiffness and damping of the system. This state requires some sort of speed control.
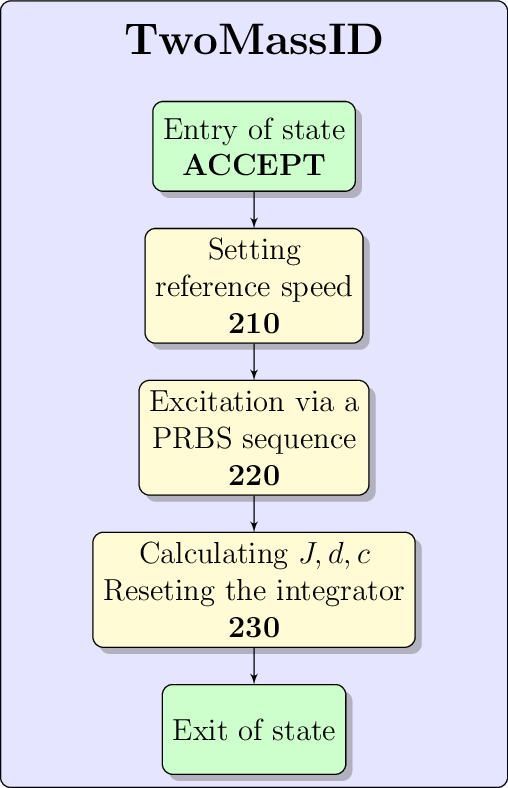
Fig. 66 Schematic overview of the TwoMassID
Necessary measurement values
i_dq
omega_m
TwoMassID object
-
typedef struct uz_ParaID_TwoMassID_t uz_ParaID_TwoMassID_t
Object definition for uz_ParaID_TwoMassID_t.
TwoMassID config
-
struct uz_ParaID_TwoMassIDConfig_t
configuration struct for TwoMassID specific settings
Public Members
TwoMassID output
-
struct uz_ParaID_TwoMassID_output_t
output struct of TwoMassID
TwoMassID functions
-
uz_ParaID_TwoMassID_t *uz_TwoMassID_init(void)
Initializes the uz_ParaID_TwoMassID_t object.
- Returns
uz_ParaID_TwoMassID_t* pointer to object
-
void uz_TwoMassID_step(uz_ParaID_TwoMassID_t *self)
steps the TwoMassID state once
- Parameters
self – pointer to uz_ParaID_TwoMassID_t object
-
void uz_TwoMassID_set_Config(uz_ParaID_TwoMassID_t *self, uz_ParaID_TwoMassIDConfig_t Config)
Sets the config struct for the TwoMassID.
- Parameters
self – pointer to uz_ParaID_TwoMassID_t object
Config – configuration struct for TwoMassID
-
void uz_TwoMassID_set_ActualValues(uz_ParaID_TwoMassID_t *self, uz_ParaID_ActualValues_t ActualValues)
Sets the ActualValues struct for the TwoMassID.
- Parameters
self – pointer to uz_ParaID_TwoMassID_t object
ActualValues – struct for the measurement values
-
void uz_TwoMassID_set_GlobalConfig(uz_ParaID_TwoMassID_t *self, uz_ParaID_GlobalConfig_t GlobalConfig)
Sets the GlobalConfig struct for the TwoMassID.
- Parameters
self – pointer to uz_ParaID_TwoMassID_t object
GlobalConfig – struct for the general settings of the ParameterID
-
void uz_TwoMassID_set_ControlFlags(uz_ParaID_TwoMassID_t *self, uz_ParaID_ControlFlags_t *ControlFlags)
Sets the ControlFlags struct for the TwoMassID.
- Parameters
self – pointer to uz_ParaID_TwoMassID_t object
ControlFlags – pointer to the struct with the enable signals of the ParameterID
-
bool uz_TwoMassID_get_enteredTwoMassID(uz_ParaID_TwoMassID_t *self)
Gets the status of the enteredTwoMassID flag.
- Parameters
self – pointer to uz_ParaID_TwoMassID_t object
- Returns
true state has been entered
- Returns
false state hasn’t been entered
-
bool uz_TwoMassID_get_finishedTwoMassID(uz_ParaID_TwoMassID_t *self)
Gets the status of the finishedTwoMassID flag.
- Parameters
self – pointer to uz_ParaID_TwoMassID_t object
- Returns
true state has finished
- Returns
false state hasn’t finished
-
uz_ParaID_Controller_Parameters_output_t *uz_TwoMassID_get_FOC_output(uz_ParaID_TwoMassID_t *self)
Gets the pointer to the output controller struct of the TwoMassID.
- Parameters
self – pointer to uz_ParaID_TwoMassID_t object
- Returns
uz_ParaID_Controller_Parameters_output_t* pointer to the FOC controller parameters struct
-
uz_ParaID_TwoMassID_output_t *uz_TwoMassID_get_output(uz_ParaID_TwoMassID_t *self)
Gets the pointer to the output struct of the TwoMassID.
- Parameters
self – pointer to uz_ParaID_TwoMassID_t object
- Returns
uz_ParaID_TwoMassID_output_t* pointer to the output struct
Sources
- 1
Automatisierte Identifikation mechanischer Parameter in elektrisch angetriebenen Antriebssträngen, Philipp Gebhardt, 2019